
This case study on “Evaluating Energy Consumption of Electric Minibus” was provided by our friends at Dewesoft. It was written by Karla Year Morales a Sales Engineer at Dewesoft Mexico with the assistance from Vehicle Technology Assessment Laboratory (LETEV) at the National Autonomous University of Mexico (UNAM). To read the original article, click here.
Summary of the case study about evaluating energy consumption of electric minibus
In Mexico, a publicly funded university projected wanted to evaluate the energy required to run electric minibuses on various bus routes in Mexico City. However, the testing project required an autonomous real time measurement system. Firstly, the system needed a sample rate of up to 1MS/s. Also it had to be capable of relating the bus position to voltage and power consumption data. Finally, test drives were to be conducted at different speeds and various loads.
Introduction
The Vehicle Technology Assessment Laboratory, LETEV (Laboratoria de Evaluacion de Tecnolgias Vehiculares) is a department of the Institute of Engineering of the National Autonomous University of Mexico (UNAM). The Ministry of Education, Science, Technology, and Innovation (SECTEI) of Mexico City is financing the project. It wants to determine the energy demand and driving range of vehicles with hybrid and electric power trains in real driving conditions in Mexico City.
Therefore, field tests on commercial vehicles and prototypes were used. However, the tests had to include data from specific database of Mexico City. This was the driving cycles on the lines of the current bus transport system called the MetroBus.
Pilot Tests on an Electric Minibus
At the beginning of 2022, LETEV recognised the need to install a portable data acquisition system inside an electric minibus used by the MetroBus transport system. As a result, the laboratory chose the Dewesoft SIRIUS-R2DB System. This was because it is an autonomous system suitable for the type of testing involved.
Firstly, voltage and current sensors combined with the signal from the GPS module were used inside the minibus. This was to record instantaneous data of the variables associated with the vehicle’s route. Secondly, emphasis was on measuring the voltage and current were required by the battery bank.
Why Dewesoft?
The Dewesoft R2DB is a battery powered autonomous data acquisition system. Another factor was the ability to observe graphs from the data captured in real time. Plus, it had a sample rate of up to 1 MS/s and through the GPS System you could locate the bus and correlate the corresponding measurements of voltage and current consumed.
The SIRIUS-R2DB System comprised of:
- SIRIUSir-HS8xLV Card
- SIRIUS-HS-2xHV-2xSTG+-DUAL Card
- Compact mobile data acquisition system
- Built in data logger
- Powerful data processing computer
- Touch Screen
- Mouse
- Keyboard
- Internal Batteries for autonomous work
- Back up Li-ION battery packs for stand-alone, in-vehicle or remote test and measurement applications
Plus the Dewesoft Power Analysis Solution
Furthermore, the LETEV used the Dewesoft Power Analysis solution which allowed them further to analyse the data obtained. Also, the ability to define the battery bank capacity concerning the minibus’s speed, distance, and load capacity. The data available can be useful for many things. Such as battery development in terms of efficiency analysis, cell characterisation, resistance and shock tests, ageing, overheating/overload tests and short circuit analysis. Plus, monitoring applications including data logging, transient logging, charge, and discharge analysis.
Many parameters or variables influence energy consumption and driving range of electric vehicles. Some of these include temperature, weather conditions, road quality, driving situations (city, uphill, downhill, unsealed road etc. and different driving styles. However, Dewesoft’s Power Analyser takes all these variables into account when providing an energy analysis.
Other items used for measurement included
- SIRIUS-R2DB with a SIRIUSir-HS-8xLV card and SIRIUS-AMP-2xHS-HV2xHS-STG+-DUAL Card
- DS-CLAMP-1800DC Hall effect clamp meter
- DS-GPS-SYNCH-10Hz – 10 Hz GPS receiver/antenna with PPS and NMEA protocol
Characteristics of the Electric Minibus

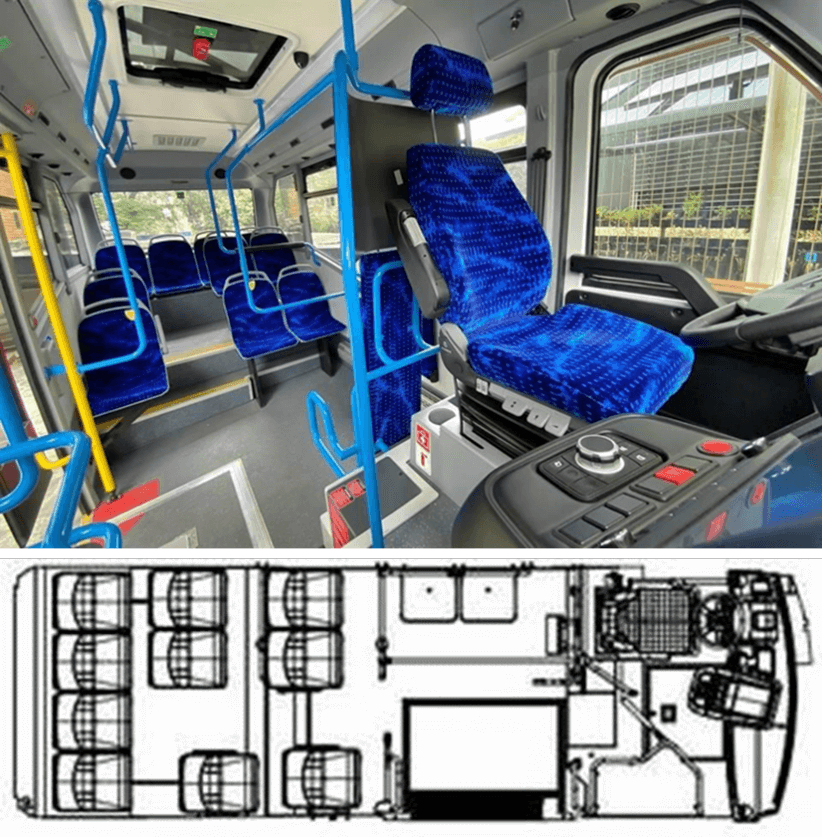
Firstly, the electric minibus used during the testing was the Jest Model. It is from a Turkish Company called Karsan. Firstly, the Jest gets its power from 100% electric BMW motor with high acceleration performance. Therefore, BMW lithium-ion batteries and charging technology power the minibus.
Most Relevant Features of the Jest Electric Minibus
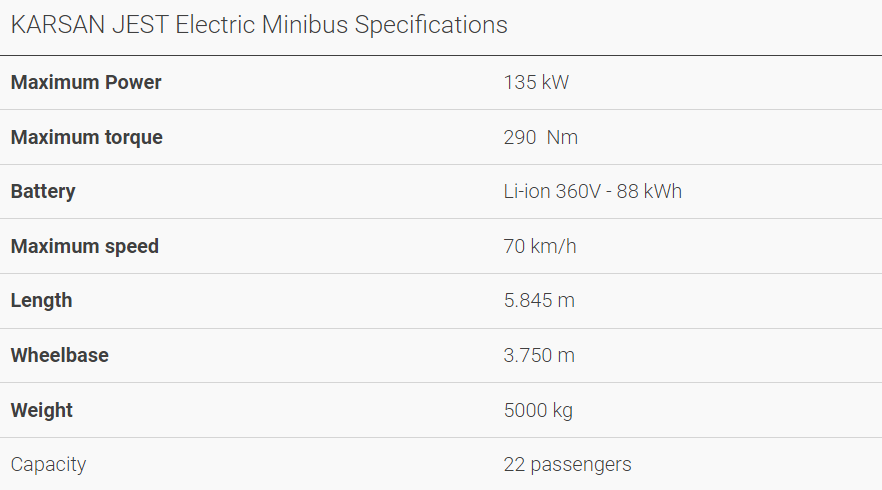
Secondly, the Karsan electric minibus has ten fixed and two folding seats. At maximum load, 10 passengers are assumed to be standing.
Methodology for the Tests
The methodology used to prepare the tests was as follows
- Define the route(s) of interest.
- Carry out at least three instrumented trips on the line(s) of interest for each load condition. The extreme cases – a journey without passengers and a journey with the vehicle’s maximum capacity – were evaluated.
- Also, Perform data processing and analysis.
- Quantify the energy consumption of transport units.
- Route 4 of the METROBÚS transportation system was selected to carry out the evaluation.
- The trajectory began at CETRAM Pantitlán, arriving at the Hidalgo station, located next to the central mall in Mexico City, and returning to the starting point. During the evaluation, the trajectory followed routes identified by the yellow line in the satellite view of Figure 3. Finally, the average distance travelled is estimated to be 19.3 km per section.

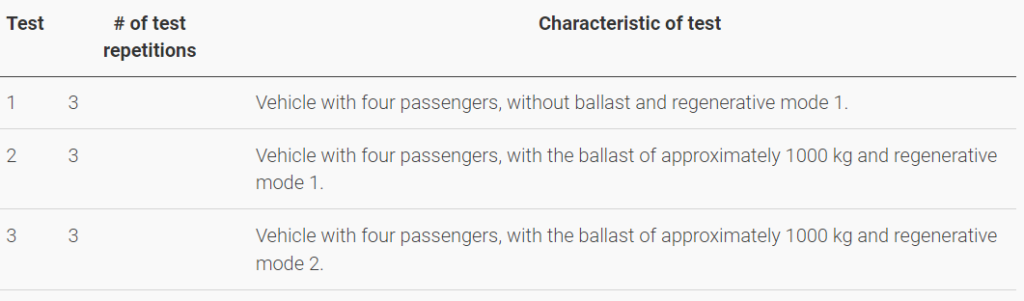
The characteristics of the tests carried out on the electric minibus can be seen below.
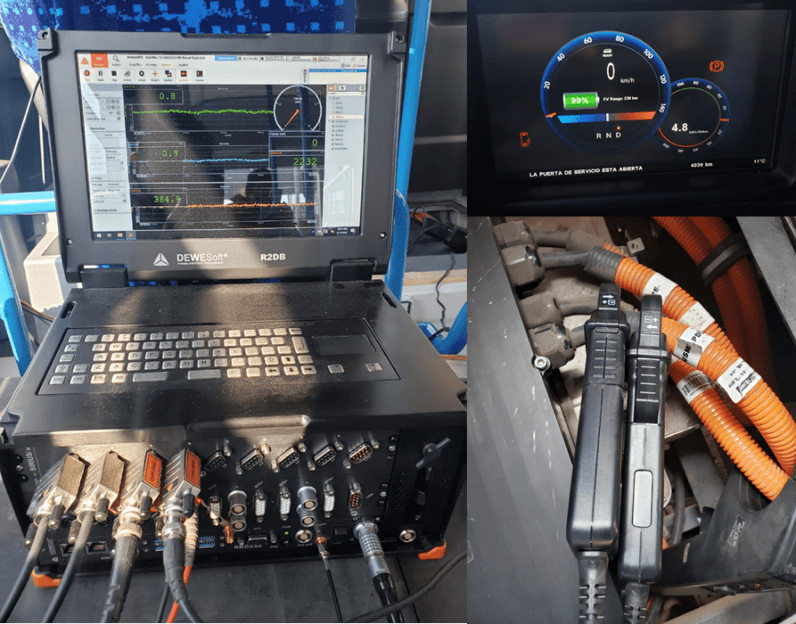
This next image shows the installation of the data acquisition equipment inside the electric vehicle. The current sensors were installed on the power lines of the battery bank and the instrument cluster of the vehicle
Six of the nine tests were done with static ballast, as mentioned in previous table. This next image shows the arrangement of the lead-acid batteries used for this purpose.

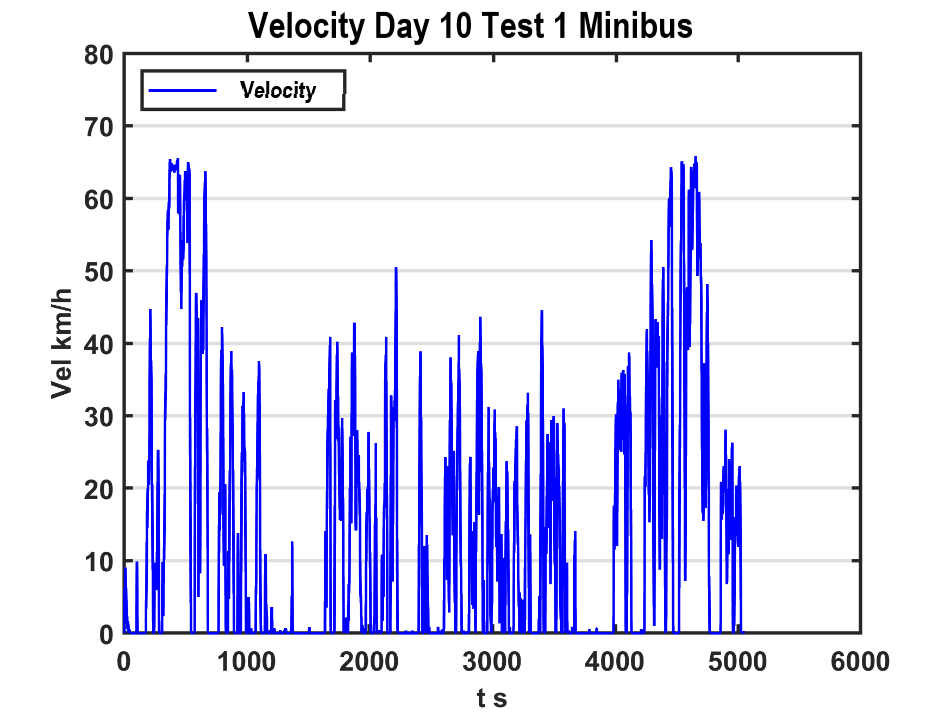
Instantaneous Speed Data
Below are examples of instantaneous speed data collected during tests on the electric vehicle. Additionally, data was processed statistically to obtain a driving map of each trajectory and perform simulations of different vehicle configurations.
Speed VS time graph for a journey on route 4 trajectory of the MB transport system without static ballast or speed governor.
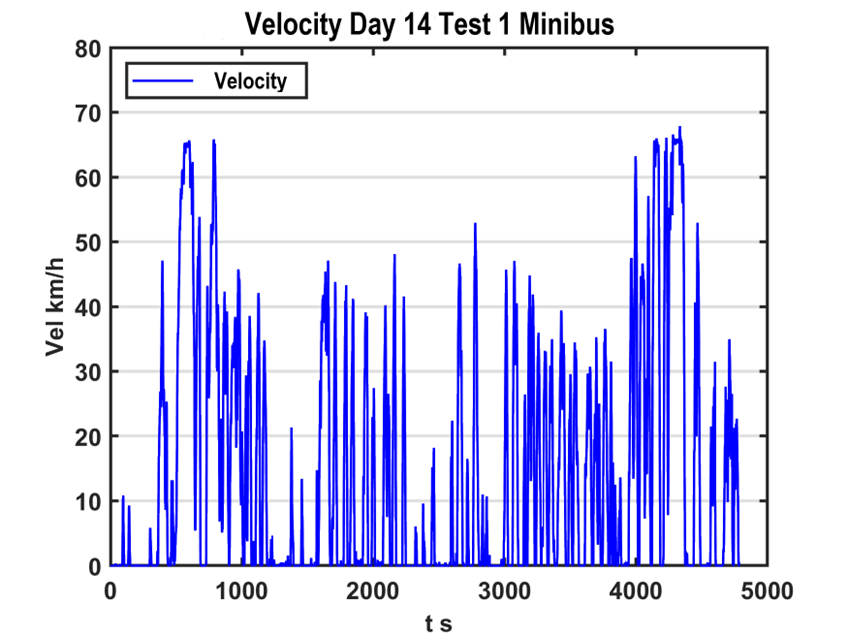
The velocity VS time graph for a test tour on the route 4 trajectory of the MB transport system with static ballast, without governed speed.
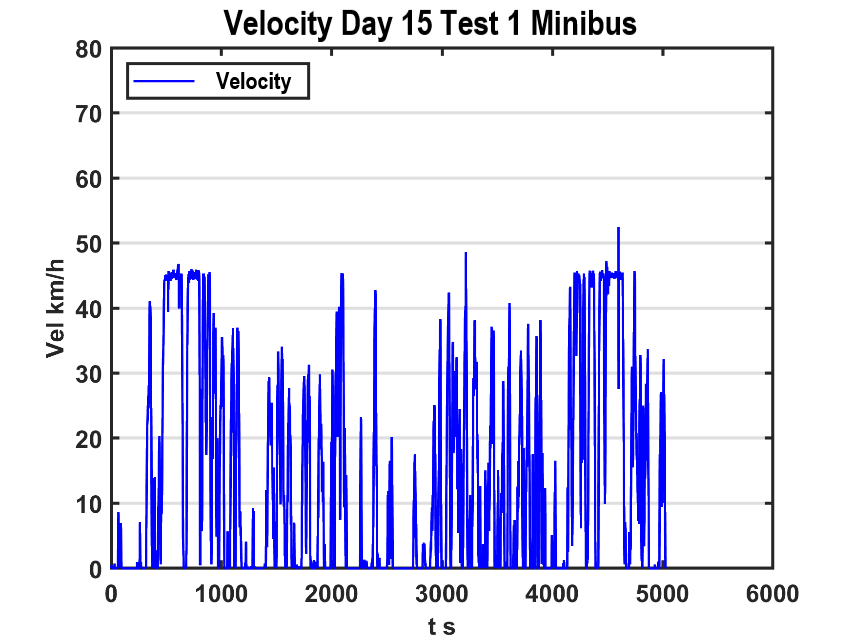
Graph speed VS time for a journey on route 4 trajectory of the MB transport system with static ballast and speed governed at 50 km/h.
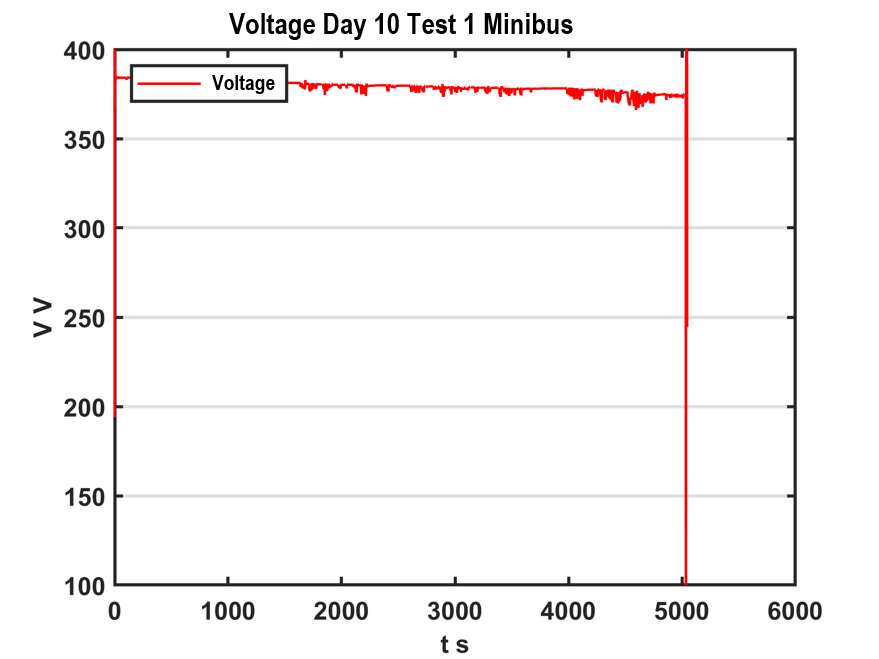
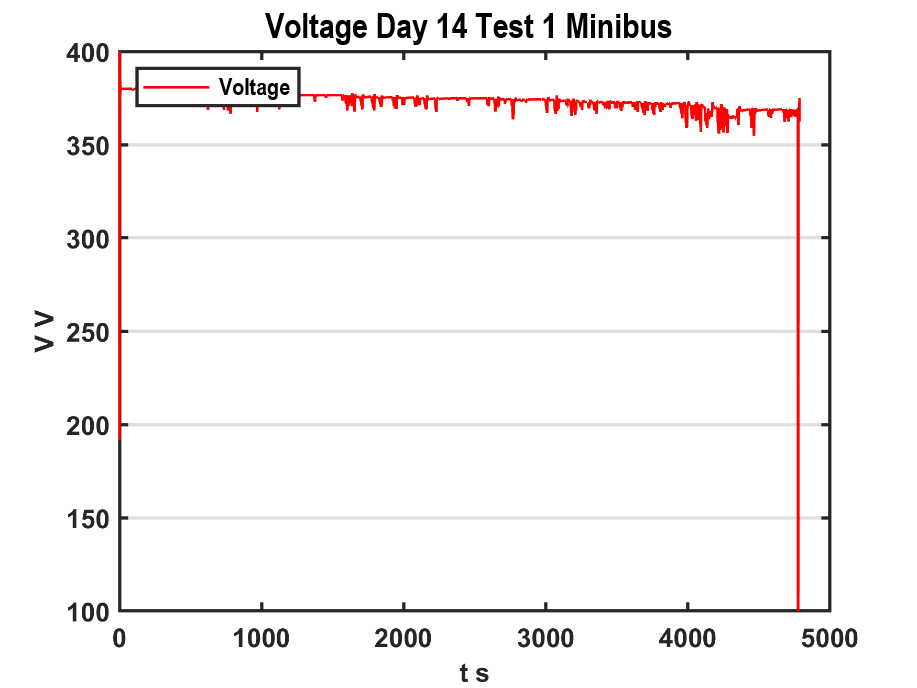
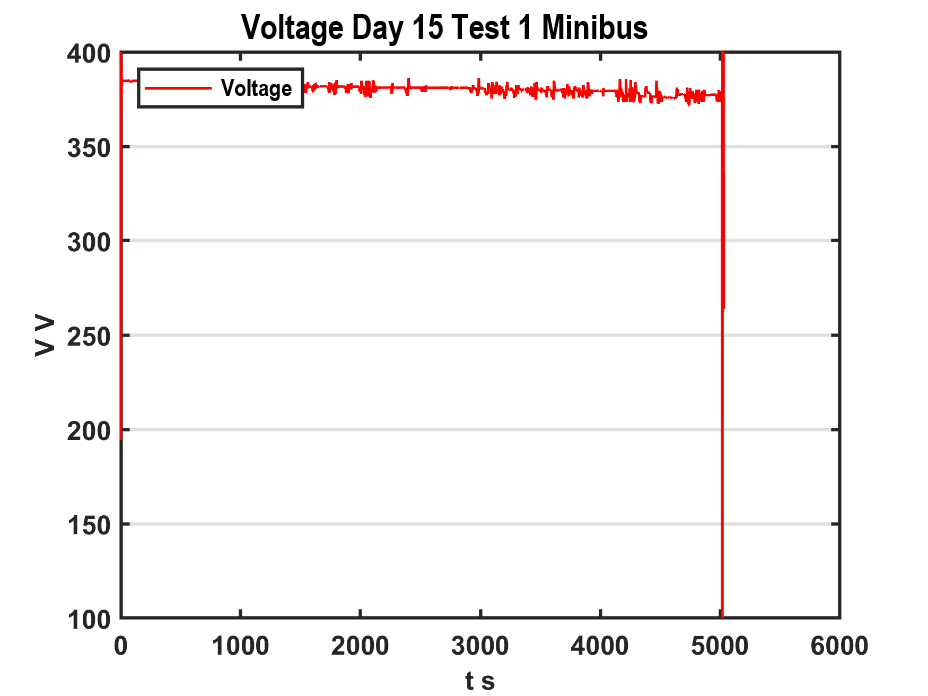
Operating Voltage Graphs in different driving situations
Additionally, the next images show the operating voltage of the electric minibus during trips in three different driving situations on line 4 of the MB transport system.
Voltage VS time graph for a journey on route 4 trajectory of the MB transport system without static ballast or speed governor.
Voltage VS time graph for a journey on route 4 trajectory of the MB transport system with static ballast, without governed speed.
Time VS Voltage graph for a journey on route 4 trajectory of the MB transport system with static ballast and speed governed at 50 km/h.
The Results
LETEV carried out three different types of testing.
- Firstly, the minibus was driven without a speed limit (speed governor) and with the minimum number of people necessary for the development of the tests (four passengers and the operator).
- In the second type of experiment, around 45 lead-acid batteries were used as a static ballast; speed remained unrestricted.
- The third type of test was carried out with the maximum speed of the electric minibus governed at 50 km/h.
- Three tests were made for each proposed type of test. Therefore, data was obtained on a total of nine drives on line 4 of the “METROBÚS” transportation system.
- The graph below presents an example of the instantaneous power registered during the journeys on line 4 of the MB. The red line indicates when the electric motor demands power, while the green line represents the active moments of the regeneration system.
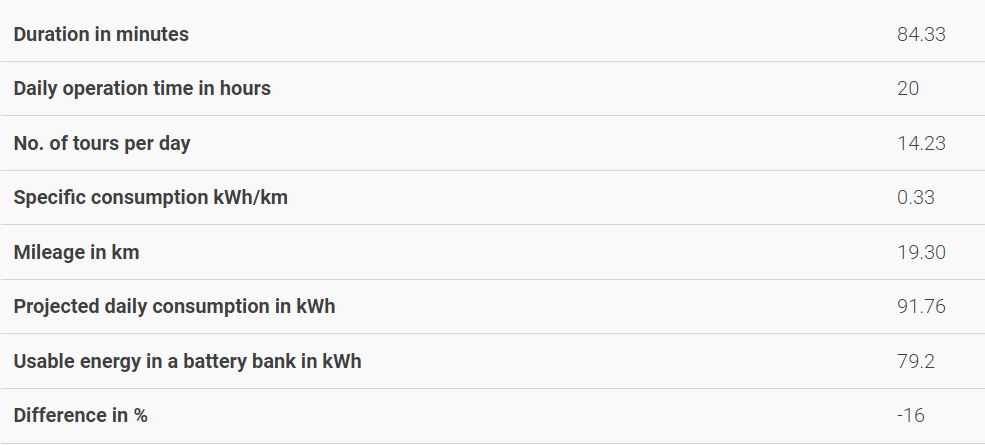
The average results obtained from the processing of the nine tests executed are analysed in the table below. The projected daily consumption was obtained by considering the distance equivalent to 14.23 journeys per day and the specific consumption registered in the vehicle.
Conclusion
Based on the experimental routes developed on line 4 of the “METROBÚS” transportation system in Mexico City, it can be mentioned that:
- The evaluation tours had an average duration of 84.33 min.
- The average distance travelled per trip is 19.3 km.
- When considering a daily operating time of 20 hours. The projected consumption per unit is 91.76 kWh. Knowing that the usable energy of the battery bank is 79.2 kWh (90% of 88 kWh), it will be necessary to increase the autonomy of the selected vehicle to operate on the route of the transport system, or to establish adequate logistics to recharge the units during the operating periods.
- To obtain a representative value of the autonomy of a vehicle, it is essential to obtain instantaneous values of speed, voltage, current, etc. Having a portable data acquisition system with easy configuration, such as Dewesoft’s SIRIUS, allowed the development of the experimental tests.
- The data collected during the tours allowed obtaining a “drive cycle” characteristic of line 4 north of the CDMX “METROBÚS” transport system. This information was entered into the AVL CRUISE M simulation system. Used to predict the energy consumption of larger units. Therefore, the results obtained provided tools for a better selection of the electrical units that will be incorporated into the transportation system. However, from this information it is possible to predict that the power demand required for larger units was less than that suggested by the manufacturer and, thus, achieving a considerable reduction in costs.
Future work
There is a continuous and rapid increase in electric vehicle (EV) adoption in many countries. This is due to lower prices, government incentives, and subsidies, as well as the need for energy independence and environmental problems. Also, predictions are that electric vehicles are expected to dominate the private car market in a few years.
However, electric vehicles that charge their batteries from the mains and can cause serious effects if not handled properly. On the other hand, they could provide many benefits to the electricity grid and earn income for homeowners if managed well.
Also in future stages of the operation of the ” Laboratorio de Evaluación de Tecnologías vehiculares” (LETEV) project, will review the possible negative impacts of charging electric vehicles on electric power systems. Specifically related to uncontrolled charging. Finally, the project will establish how these impacts can be reduced through controlled loading and unloading.
Dewesoft data loggers and sensors used for determining:
- the impacts of uncontrolled charging of electric vehicles on the increase in peak demand,
- voltage deviation from acceptable limits,
- phase imbalance due to single-phase chargers,
- harmonic distortion, as well as
- overload of power system equipment and increase in power losses.
Thanks to
- The Secretaría de Educación, Ciencia, Tecnología e Innovación of Mexico City.
- The transportation system of Mexico City “METROBÚS”.
- The collaborators of the Laboratory for the Evaluation of Vehicle Technologies “LETEV”