Research and university projects increasingly require accurate motion, orientation, and navigation data to support experimentation, validation, and system development. Inertial navigation sensors play a central role. Delivering continuous reference data across controlled tests, field trials, and experimental platforms.
VectorNav designs and manufactures MEMS-based inertial navigation products that researchers and universities integrate into platforms where flexibility, repeatability, and compact embedded hardware matter.
Metromatics is the exclusive distributor for VectorNav in Australia and New Zealand, providing local access and support.
Research and University Navigation Requirements
Research and academic environments often demand:
- Reliable orientation reference (roll, pitch, yaw)
- Accurate motion and acceleration measurement
- Position and velocity estimation for field experiments
- Time-aligned data capture across multiple instruments
- Compact hardware suitable for rapid integration
Therefore, researchers commonly select IMU, AHRS, and GNSS-aided INS technologies that integrate cleanly with data acquisition, control, and analysis systems.
Embedded PNT for Research Platforms
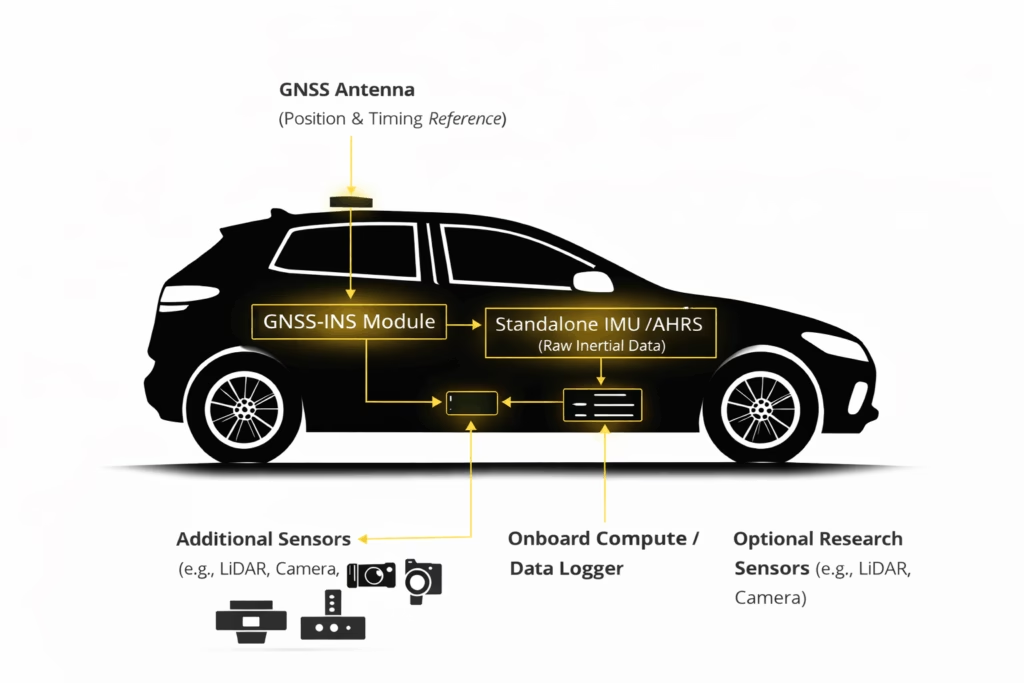
VectorNav products provide embedded positioning, navigation and timing (PNT) capability when GNSS is available most of the time.
- Positioning: GNSS-derived position for experiment reference
- Navigation: Orientation and motion derived from inertial sensors
- Timing: GNSS-derived timing for synchronisation and time alignment
As a result, researchers can correlate datasets from multiple sensors, instruments, and subsystems with consistent timing.
VectorNav products assume GNSS availability for absolute position updates. While inertial sensors maintain continuity during short GNSS interruptions commonly encountered during experiments or field trials.
VectorNav Solutions for Research & Universities
VectorNav supports a wide range of research activities through three core product categories.
IMU and AHRS
Use these devices when projects require:
- Orientation reference
- Motion and vibration measurement
- Stabilisation inputs for control experiments
IMU/AHRS devices deliver calibrated inertial data and real-time attitude outputs that integrate easily into laboratory and field setups. Learn more about AHRS.
GNSS-Aided INS
Select GNSS-INS when projects require:
- Position and velocity alongside orientation
- Integrated navigation outputs for experiments or prototypes
- Reduced development effort through onboard estimation
These devices combine inertial sensors with GNSS receivers to output position, velocity, and attitude, which simplifies experimental system design. Learn more about GNSS-INS.
Dual-Antenna GNSS-INS
Use dual-antenna configurations when:
- Accurate heading is required
- Magnetic interference affects magnetometer reliability
- Experimental platforms can support dual GNSS antennas
By deriving heading from GNSS rather than magnetic sensors, these systems improve robustness in electrically noisy research environments.
Typical Research and University Uses
Across universities and research institutions, VectorNav products commonly support:
- Experimental vehicle navigation and control research
- Robotics and autonomy development
- Motion tracking and dynamics analysis
- Sensor fusion and algorithm validation
- Test and evaluation instrumentation
In each case, VectorNav products function as embedded subsystems within a broader experimental or research architecture.
What VectorNav Is Not (Context for Research Applications)
VectorNav products are not FOG-based or strategic-grade inertial navigation systems.
In research environments, these higher-grade systems are typically reserved for ground-truth reference platforms or specialised studies. Those requiring extended navigation without GNSS.
Instead, VectorNav products suit research and university projects where GNSS is available most of the time. In addition, where compact, integratable MEMS navigation sensors provide sufficient performance and flexibility.
Integration Considerations
Final system performance depends on how the research platform is configured and integrated, including:
- Sensor placement and alignment
- Platform dynamics and vibration
- GNSS availability during experiments
- Data acquisition and processing architecture
VectorNav provides inertial and navigation outputs, while researchers retain control over system-level design and analysis. Learn more about VectorNav’s Navigation Sensors.
Local Research Support from Metromatics
As the Australian and New Zealand distributor, Metromatics supports research and universities by providing:
- Application scoping and product selection guidance
- Integration assistance with DAQ and experimental systems
- Local warranty handling and repairs/returns
- Responsive quoting and project support
For a broader overview of VectorNav inertial navigation technologies, including IMU, AHRS, and GNSS-INS solutions used across multiple industries, return to our VectorNav overview page.
Call to Action
Discuss your research or university project with our team.
👉 Request a VectorNav product recommendation
👉 Discuss experimental or platform requirements
👉 Request pricing or lead-time information